Mini Vizca 400: Gemelo Digital
El Problema
Maquintel se enfoca en analizar tubos y canales de relave usando robots móviles. Tengo curiosidad por conocer más sobre sus robots y cómo funcionan, lamentablemente no tengo acceso a ellos, así que hagámos un poco de ingeniería inversa juntos.
En este proyecto diseñé una réplica digital analizando la información pública sobre los robots de Maquintel.

Resumen de los robots de Maquintel
Si navegamos por el sitio web de Maquintel podemos ver que tienen seis robots a su disposición. Estos se pueden dividir en dos categorías principales: aquellos basados en orugas y aquellos basados en ruedas. Donde todos se enfocan en resolver el mismo problema, pero en entornos distintos.
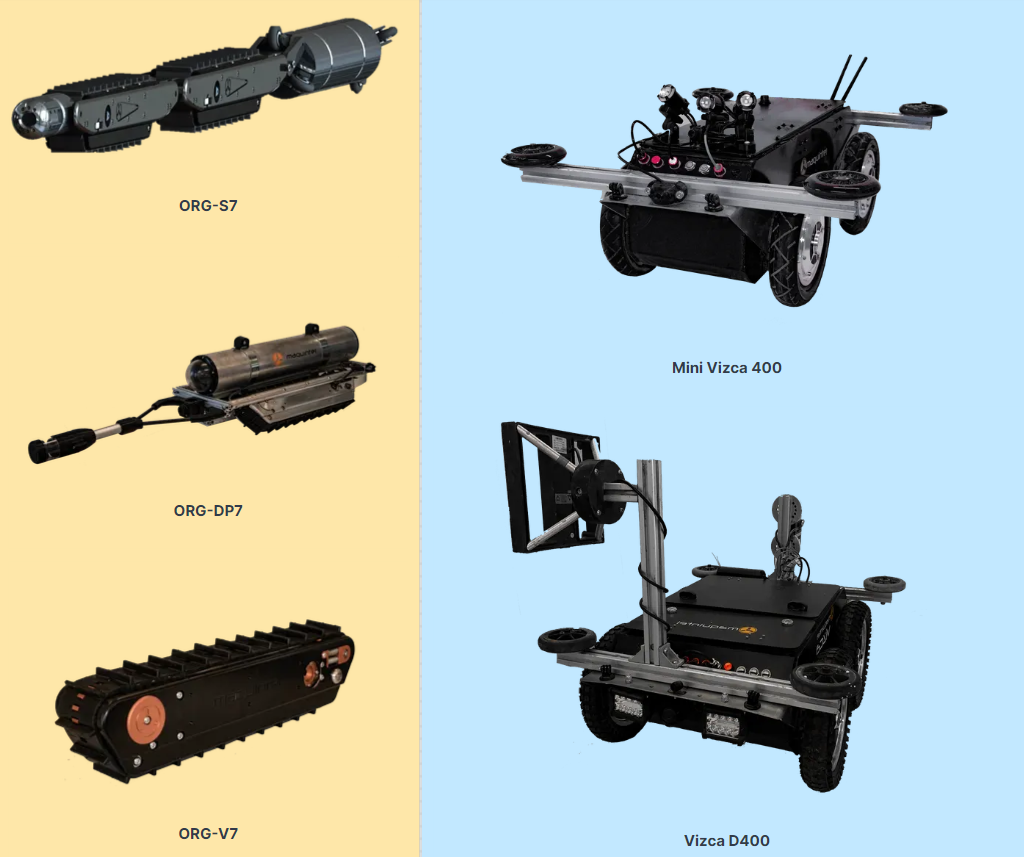
Basándonos en lo que podemos observar en las imágenes, por clase, los robots tienden hacia un mismo concepto de diseño. En aquellos con orugas, la forma base parece ser el ORG-7. El cual si se unen dos en conjunto con una cámara, forma el ORG-S7. Mientras que si se usan dos en la parte inferior se pone al camara arriba, se tiene el ORG-DP7. En lo que respecta los robots basados en ruedas, si dejamos de lado la capacidad de carga y el tamaño, el Vizca D400 y el Mini Vizca 400 son iguales.
En este caso de estudio, vamos a enfocarnos en el Mini Vizca 400, lo que es más que suficiente para representar a todos los robots con ruedas de Maquintel. Como mencioné anteriormente, solo tenemos la información que Maquintel ha compartido en su sitio web y redes sociales, las cuales usaremos como base para crear una réplica digital. Primero debemos entender las funciones a replicar. Sabemos que está destinado a ser utilizado en inspecciones de túneles y canales de relave para medir su nivel de desgaste con lidar y perfilómetros.
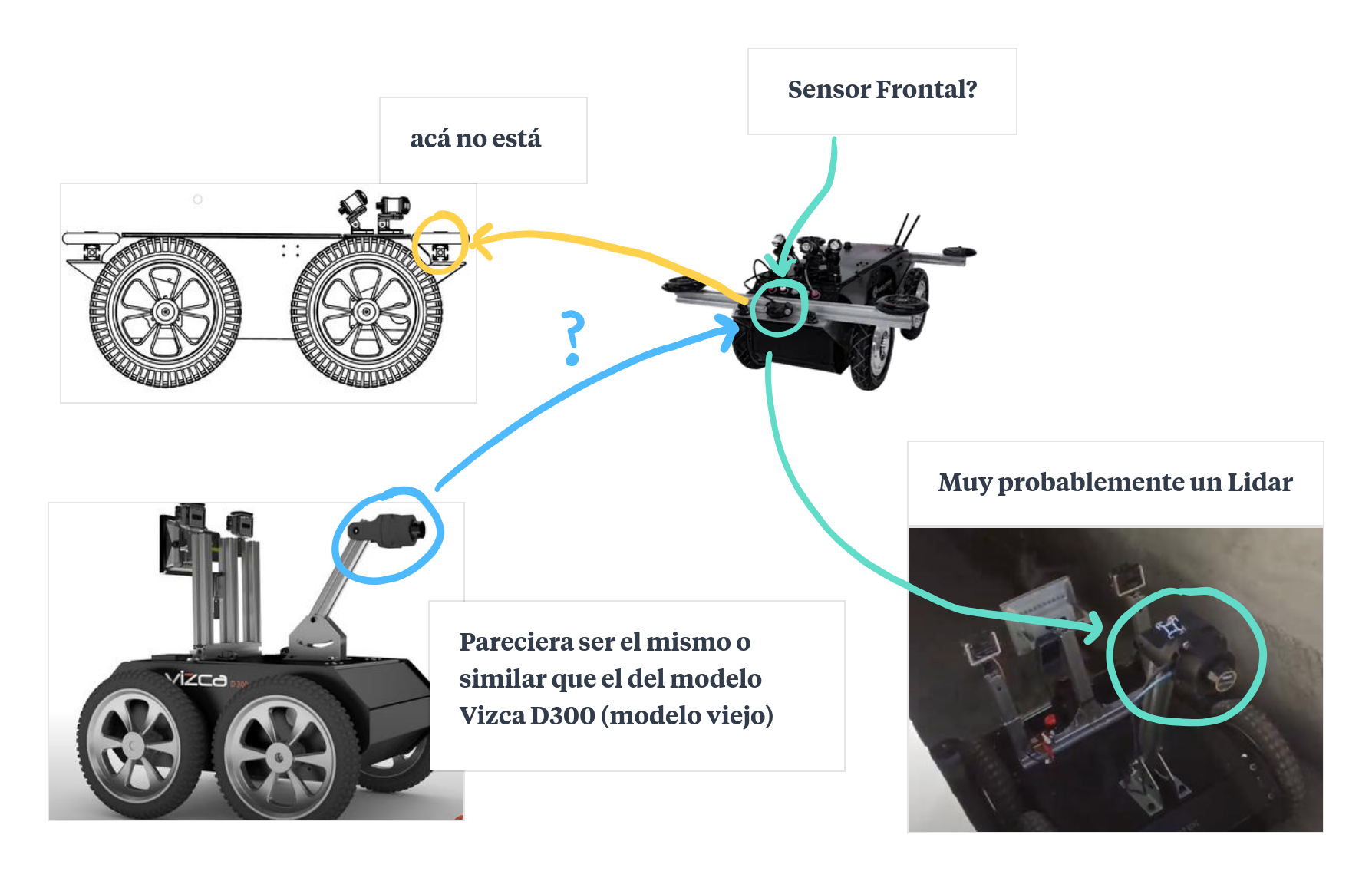
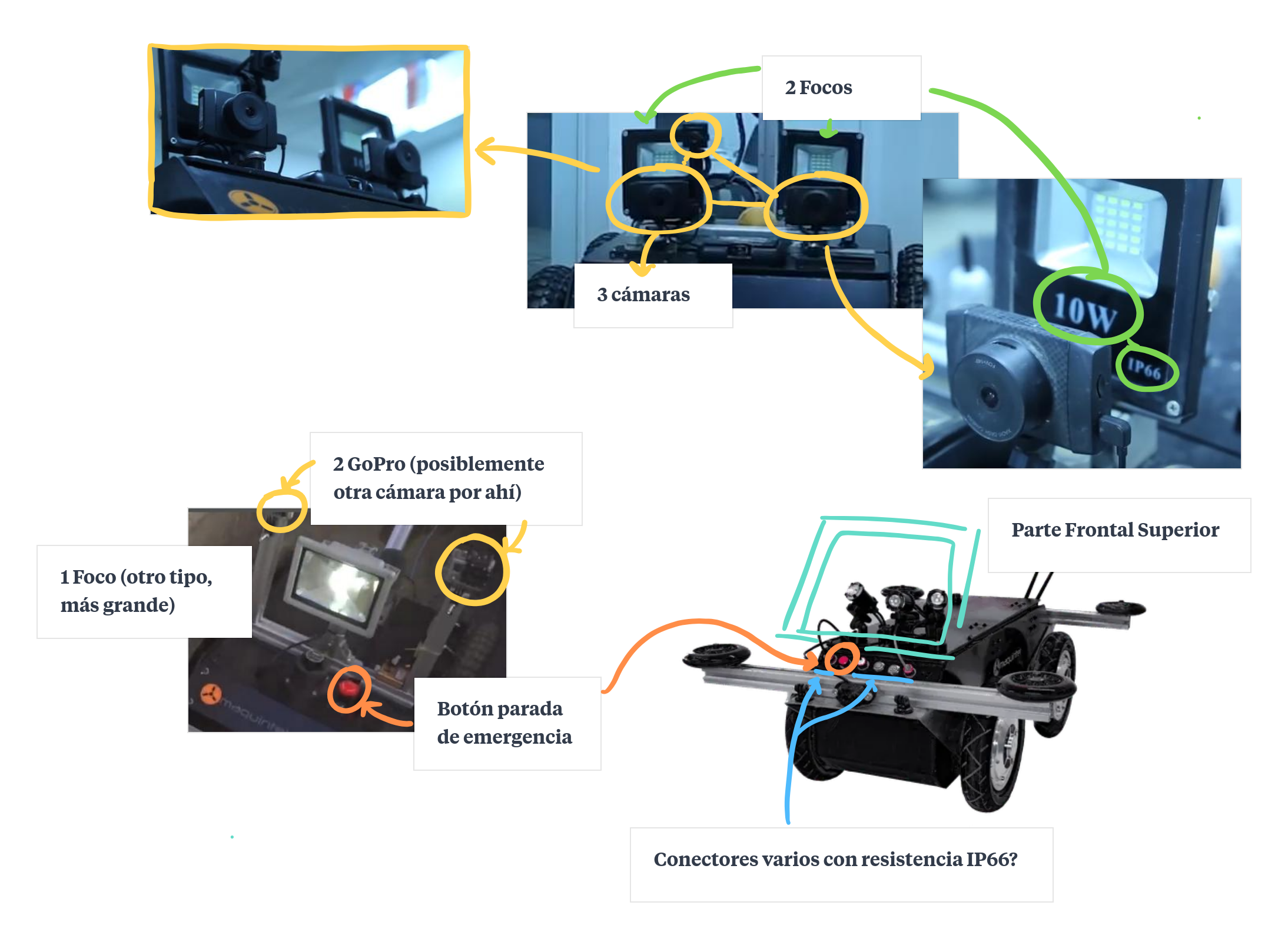

Observando vídeos e imágenes del robot, podemos ver que tiene un sensor frontal que podría o no estar presente en todas las imágenes. Parece ser un lidar que puede estar tanto en la parte delantera como trasera. El perfilómetro siempre está en uno de los lados. En cuanto a las cámaras, estas solo están ubicadas en la parte superior frontal y generalmente son entre 2 y 3, acompañadas por algunos focos.
La cantidad y posición de estos elementos varía de imagen a imagen, lo cual nos indica cómo se expresa el concepto de modularidad en el robot. Más allá de eso, podemos dividirlo en módulos conceptuales para organizar mejor nuestra réplica virtual: locomoción, visión, sensorial y estructura.
- Locomoción: 4 motores + encoders + ruedas.
- Vision: 2 cámaras laterales + 2 luces, una cámara frontal sin luz.
- Sensores: Lidar, IMU.
- Estructura: Eje de aluminio con capacidades modulares, conectores + botón de emergencia en la parte posterior, 4 ruedas voladoras para guiar el movimiento del robot.
Gemelo digital
Maquintel nos proporciona las mediciones del robot de manera vaga, pero hay una forma de obtener medidas más precisas si solo una de ellas está correcta: mantener las proporciones y medir con la regla de Fusion 360.
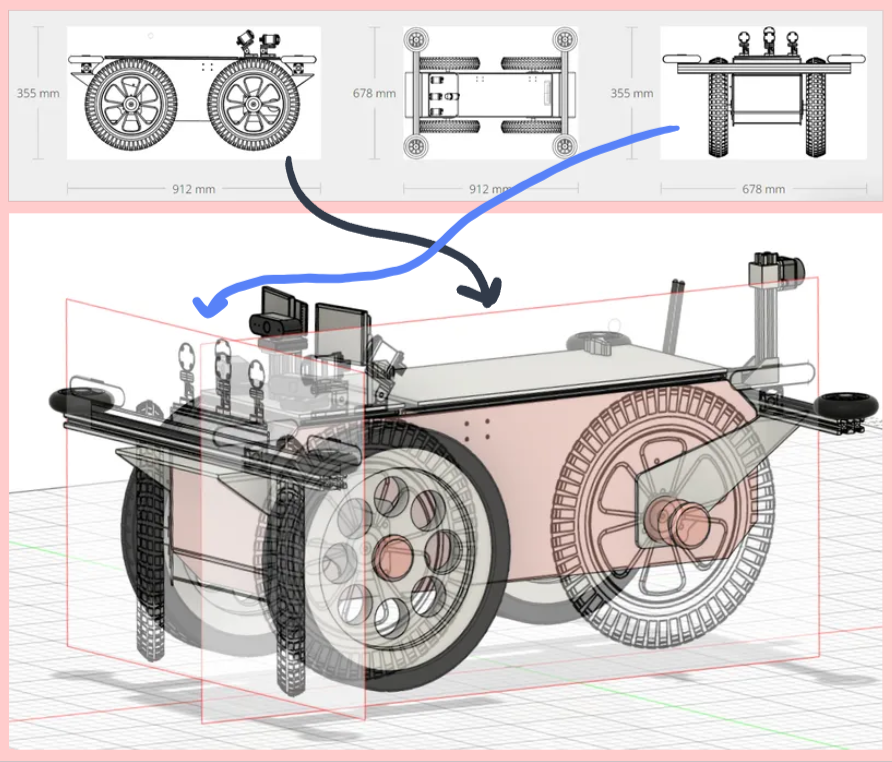
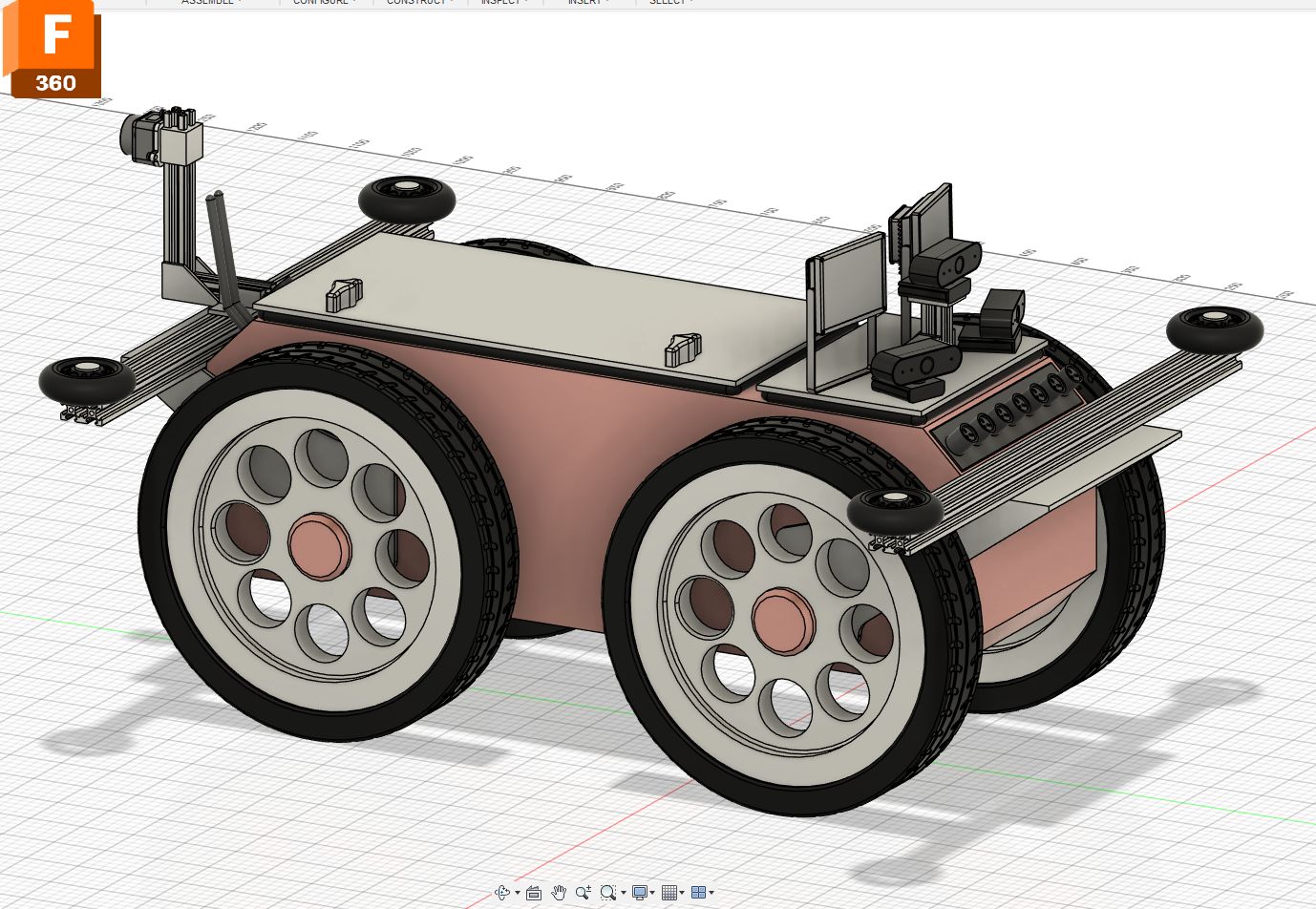
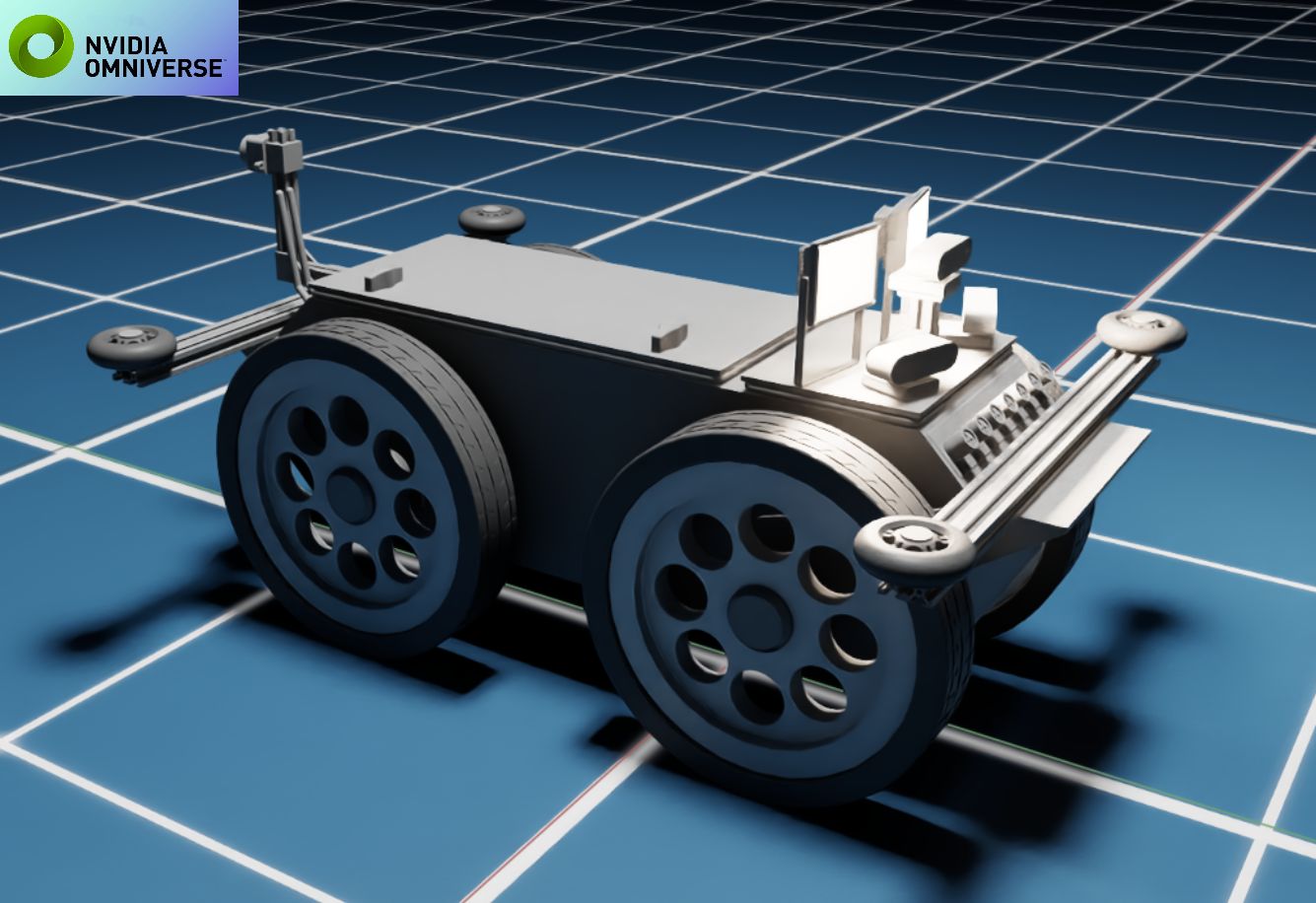
Ya tenemos el diseño. Ahora lo importaremos a Onshape para agregar las uniones. Luego, configuraremos los sensores y luces del robot en Isaac Sim para que funcionen correctamente. Una vez hecho esto, guardamos como USD y listo para probarlo.
Resultados
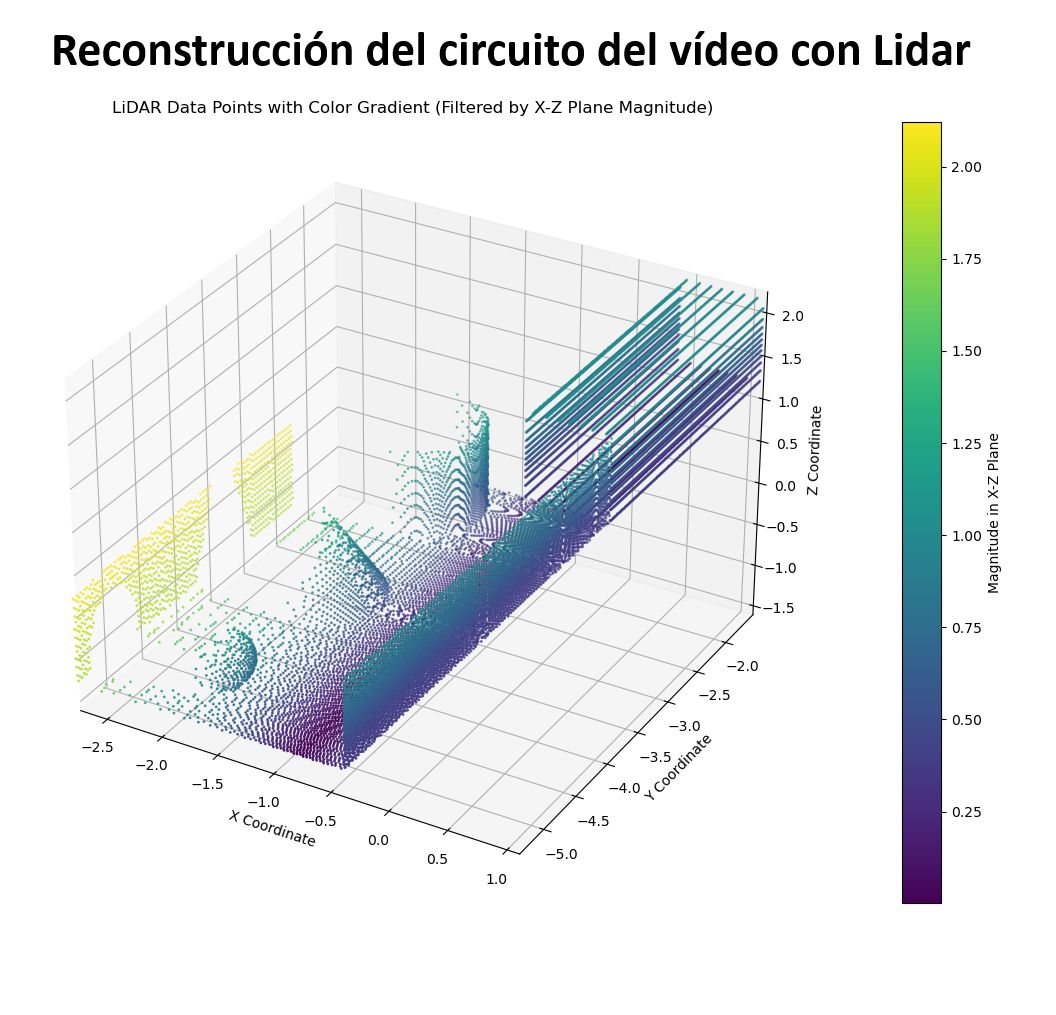
Hay dos cosas que están sucediendo, el lidar emite un laser y, a través de cuánto tiempo tarda en retornar, es capaz de medir la distancia desde este a un objeto. Ahora, si repetimos este proceso mientras el laser gira alrededor, podemos obtener el perímetro de lo que rodea al lidar en un plano. Si también calculamos la posición del robot lo suficientemente rápido, podemos adquirir planos perimetrales sucesivos para formar una representación 3D del espacio alrededor del robot.
Finalmente tenemos la nube de puntos formada por el lidar. Esto es básicamente lo que hace Maquintel para generar perfiles 3D de tubos y canales, donde con poco esfuerzo adicional se puede medir el nivel de desgaste comparando qué puntos sobrepasan cierto umbral.