Mini Vizca 400: Digital Twin
The Problem
Maquintel Robotic Services focuses on analize tubular and sluice channels worn using mobile robots. I'm curious to learn more about their robots and how they works, sadly I do not have access to them, so let's do some reverse engineering together.
In this project, I design a digital twin by analyzing public information about Maquintel's robots.

Maquintel's Robots Overview
If we navigate the Maquintel website, we can see that they have five robots at their disposal. These can be divided into two main categories: those based on tracks and those based on wheels. Where all focus on solving the same problem, but in different environments.
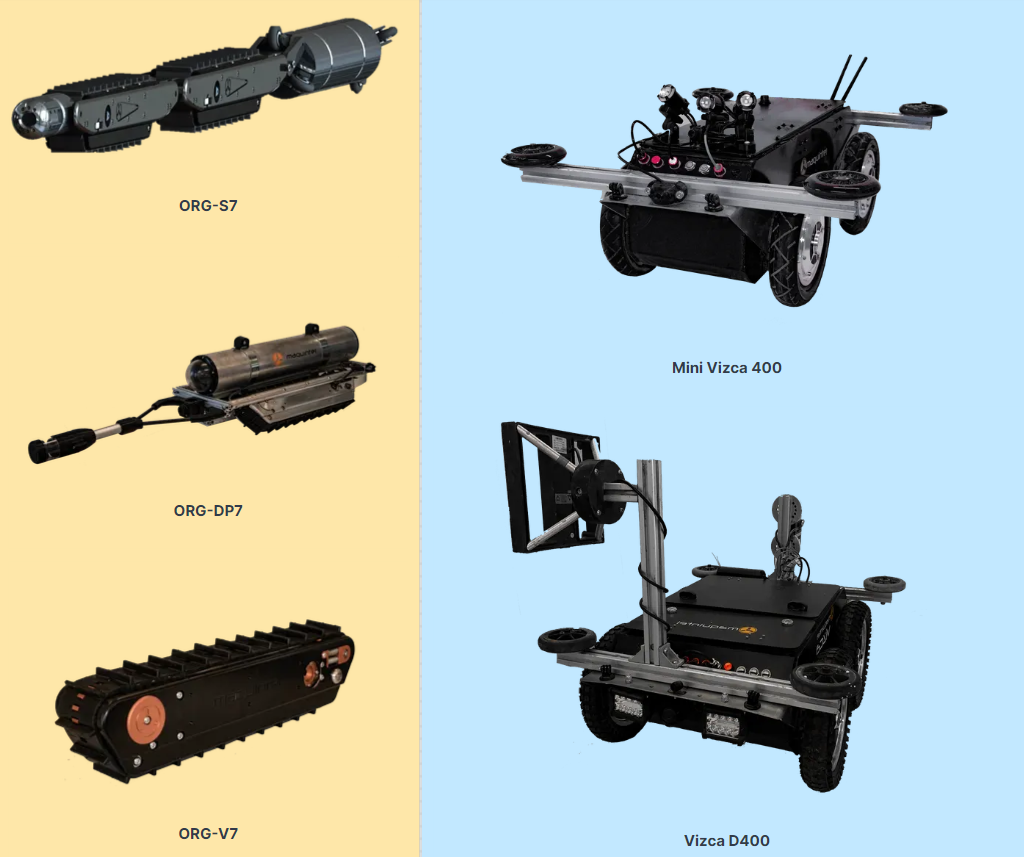
Based on what can be observed in the images, by class, the robots tend towards the same design concept. In those with tracks, the basic form appears to be the ORG-7. The one which if two are joined together with a camera forms the ORG-S7. While if two are used at the bottom with the camera on top, there's the ORG-DP7. As for the robots based on wheels, if we leave aside capacity and size, the Vizca D400 and the Mini Vizca 400 are equal.
In this case study, we will focus on the Mini Vizca 400, which is more than enough to represent all the wheel-based robots by Maquintel. As I mentioned earlier, we only have the information that Maquintel has shared on their website and social media, which we will use as a basis for creating a digital replica of their robot. First, we need to understand the functions of the robot. We know that it is intended to be used for tunnel and sluice channel inspections to measure their level of wear with lidar and profilometers.
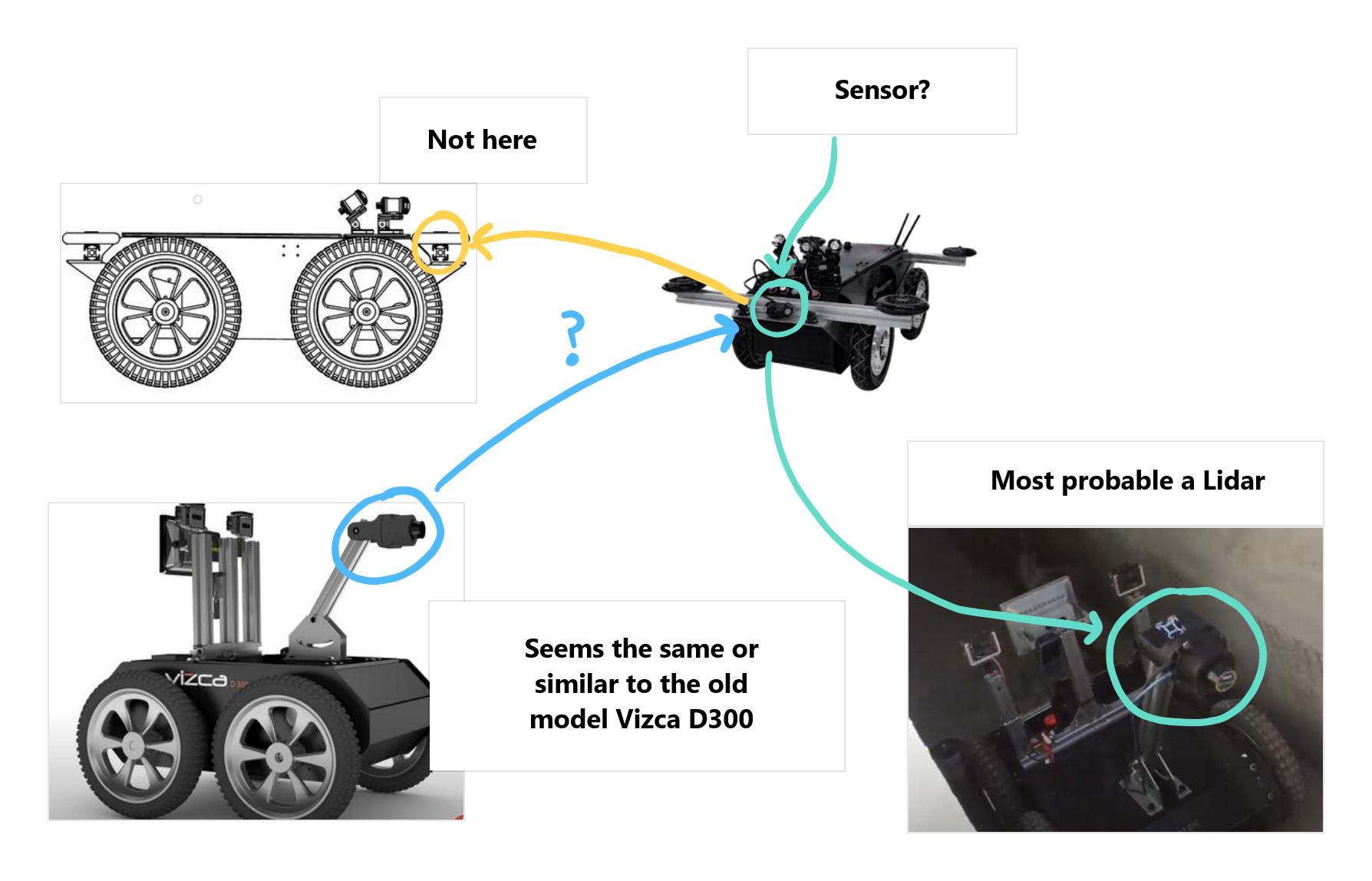
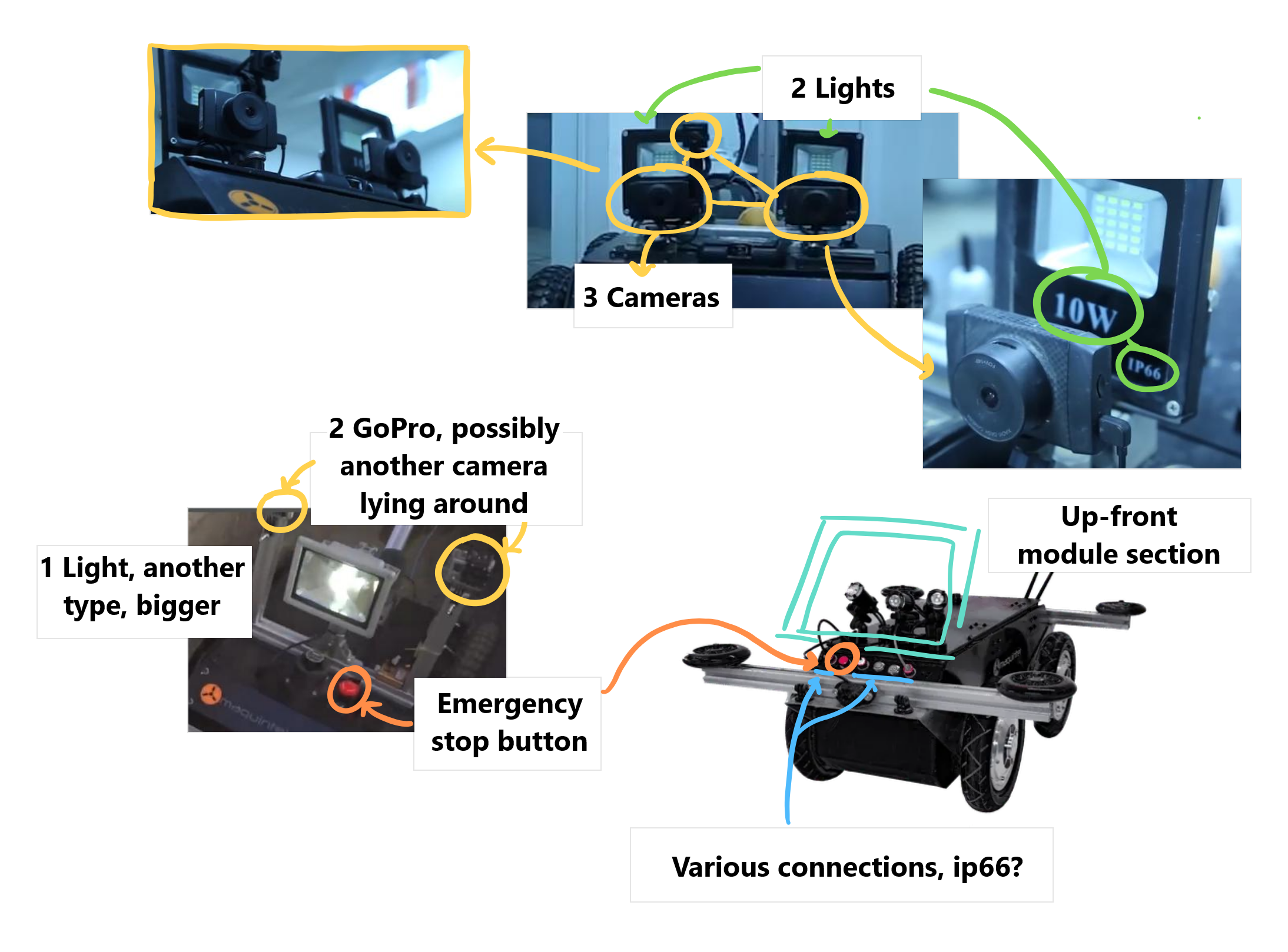
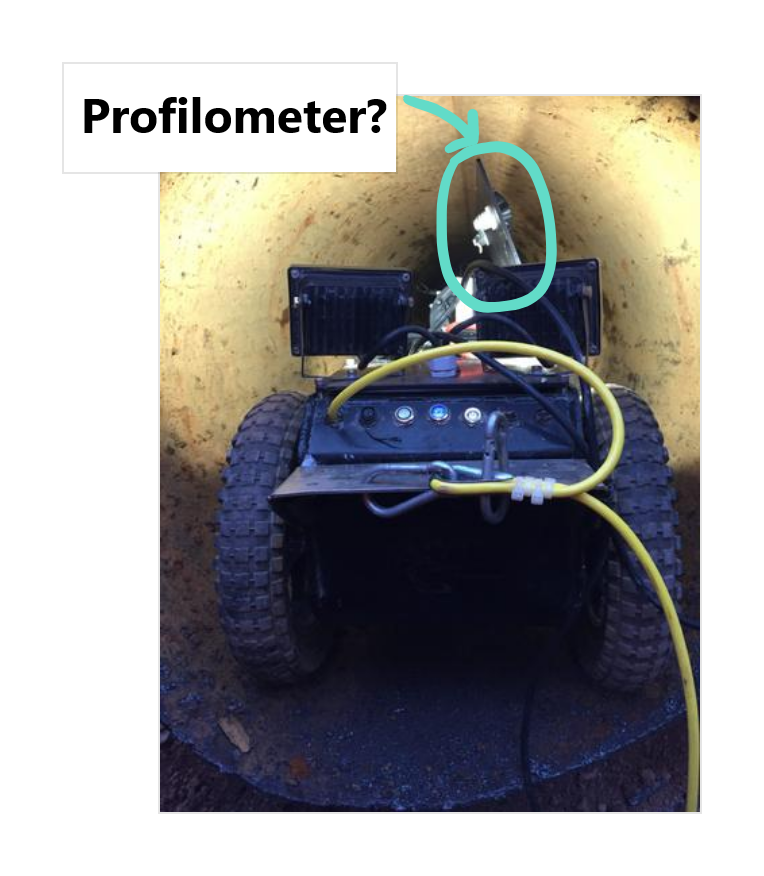
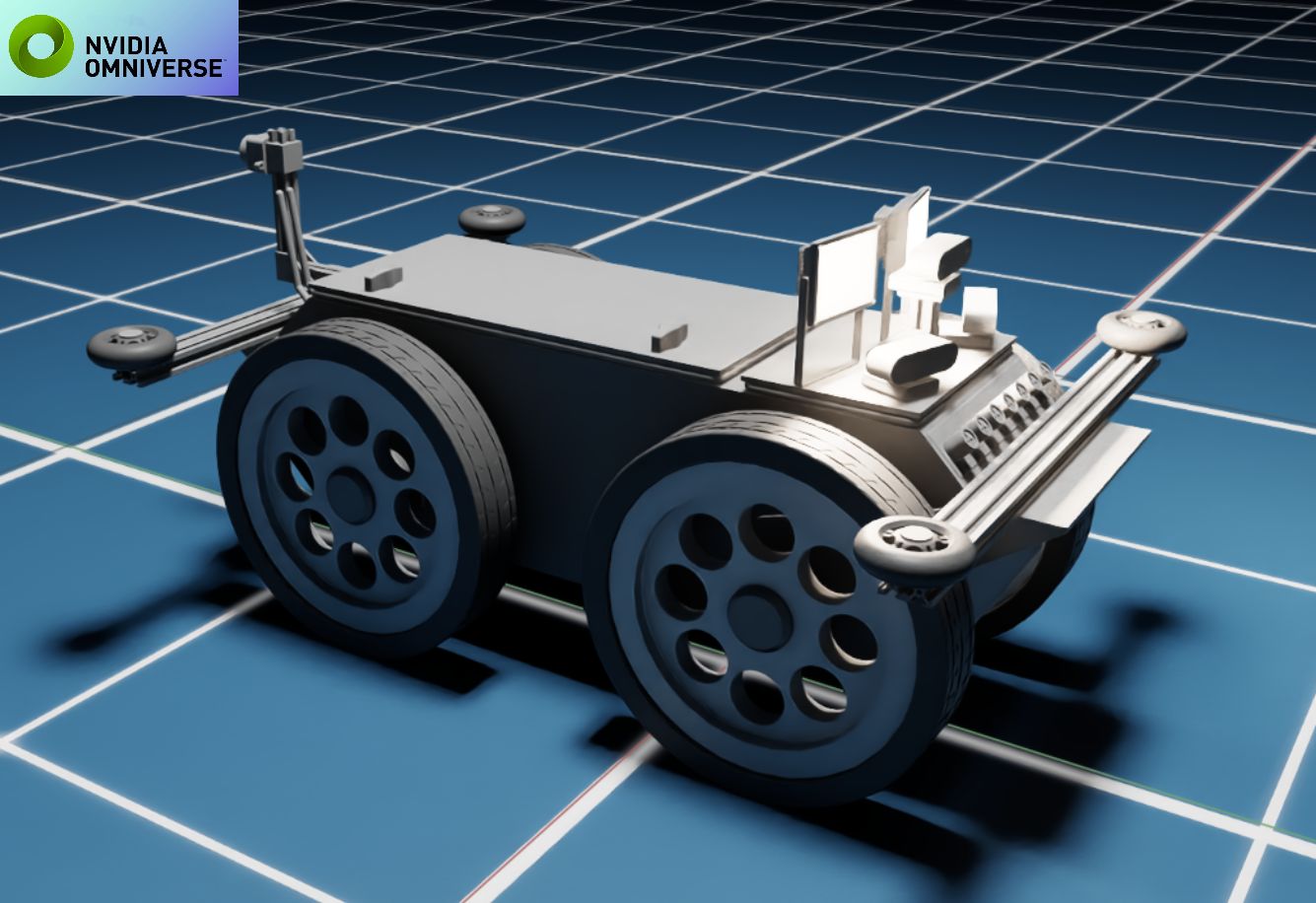
After reviewing videos and images of the robot, we can see that it has a front sensor which could or not be present in all the images. It seems to be a lidar that can be on both the front and rear parts. The profilometer is always on one of the sides. As for the cameras, they are only located in the upper front part and generally there are between 2 and 3 of them accompanied by some lights.
The number and position of these elements vary from image to image, which indicates how the concept of modularity is expressed in the robot. Beyond that, we can divide it into conceptual modules to better organize our virtual replica: locomotion, vision, sensorial, and structure.
- Locomotion: 4 motors + encoders + wheels.
- Vision: 2 lateras cameras + 2 lights, one front camera without light.
- Sensors: Lidar, IMU.
- Structure: Aluminum chasis with modular capabilities, connectors + emergency button on back, 4 flying wheels to guide the robot movement.
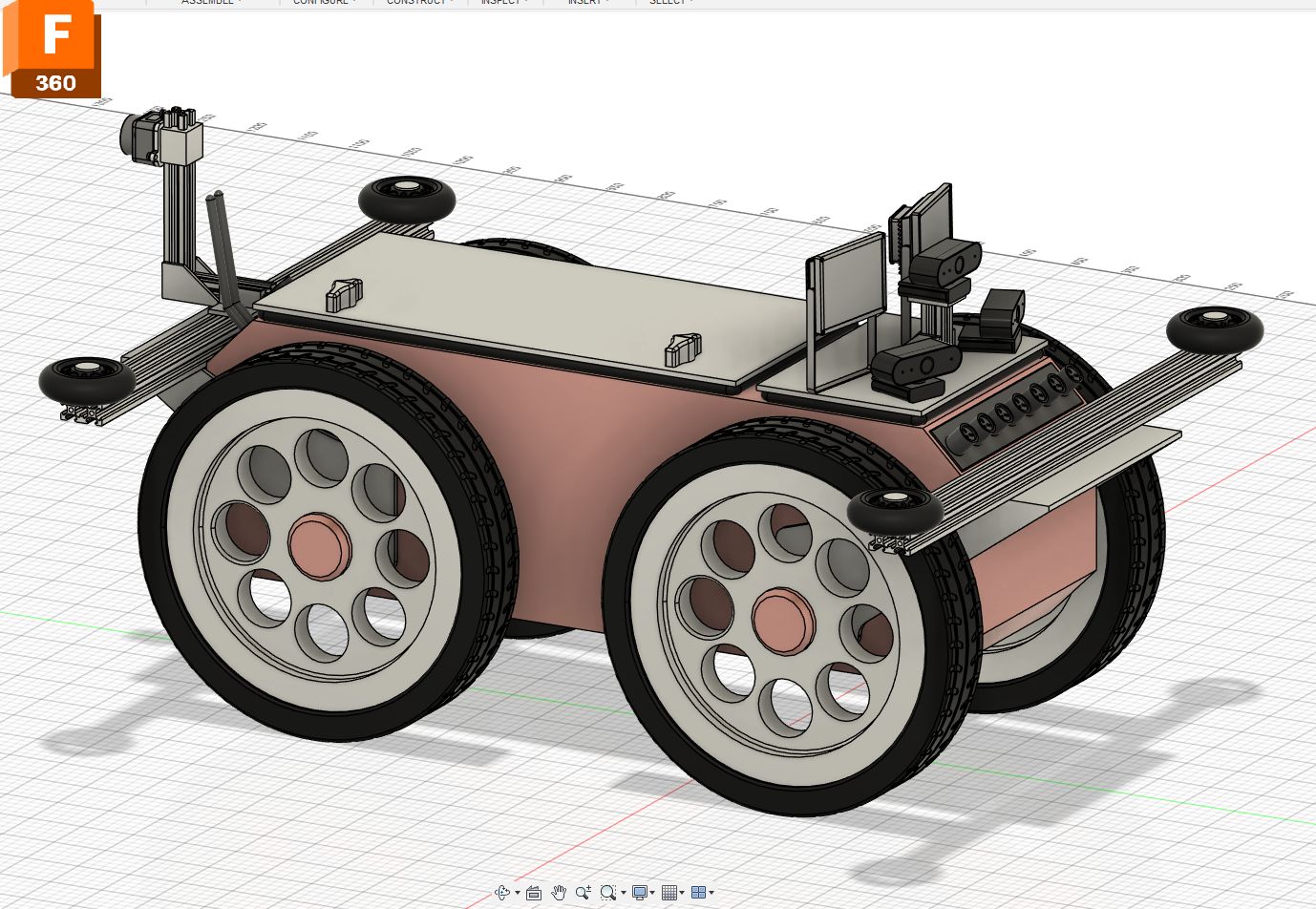
Mini Vizca 400 Digital Twin
Maquintel provides us with the robot's measurements in a vague way, but it is enough for us. There is a way to get more precise measurements if only one of them is correct: keep the proportions and measure with the Fusion 360 ruler, of course, all in the good old milimeters.
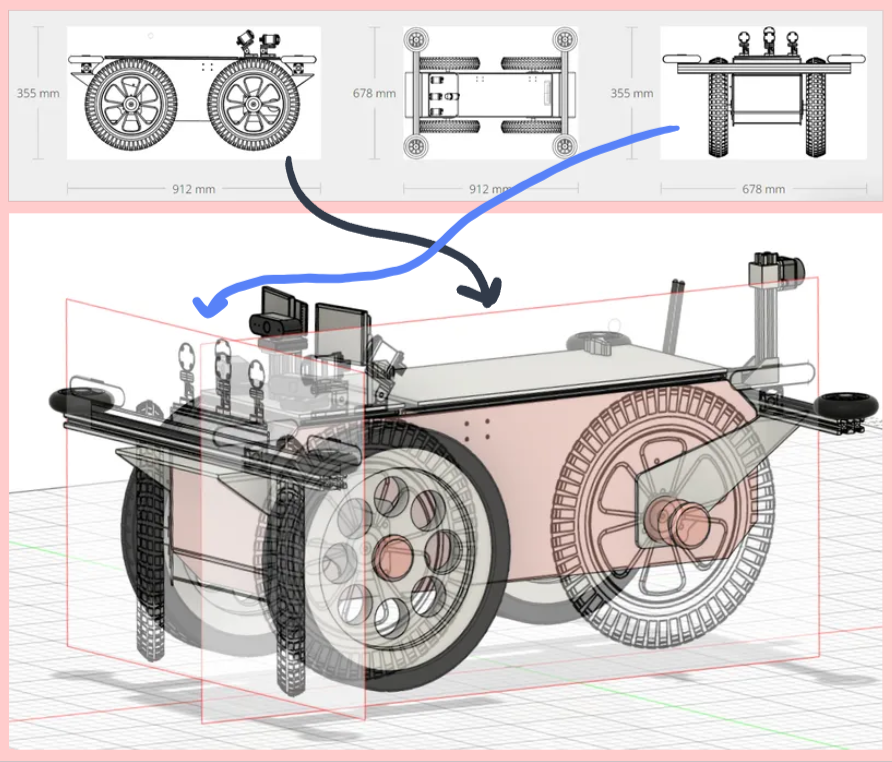
We now have the design. Now we will import it into Onshape to configure the joints. Then, we will configure the sensors and lights of the robot in Isaac Sim so that they work correctly. Once we've done this, we'll save it as USD and we're ready to test it.
Project Outcomes
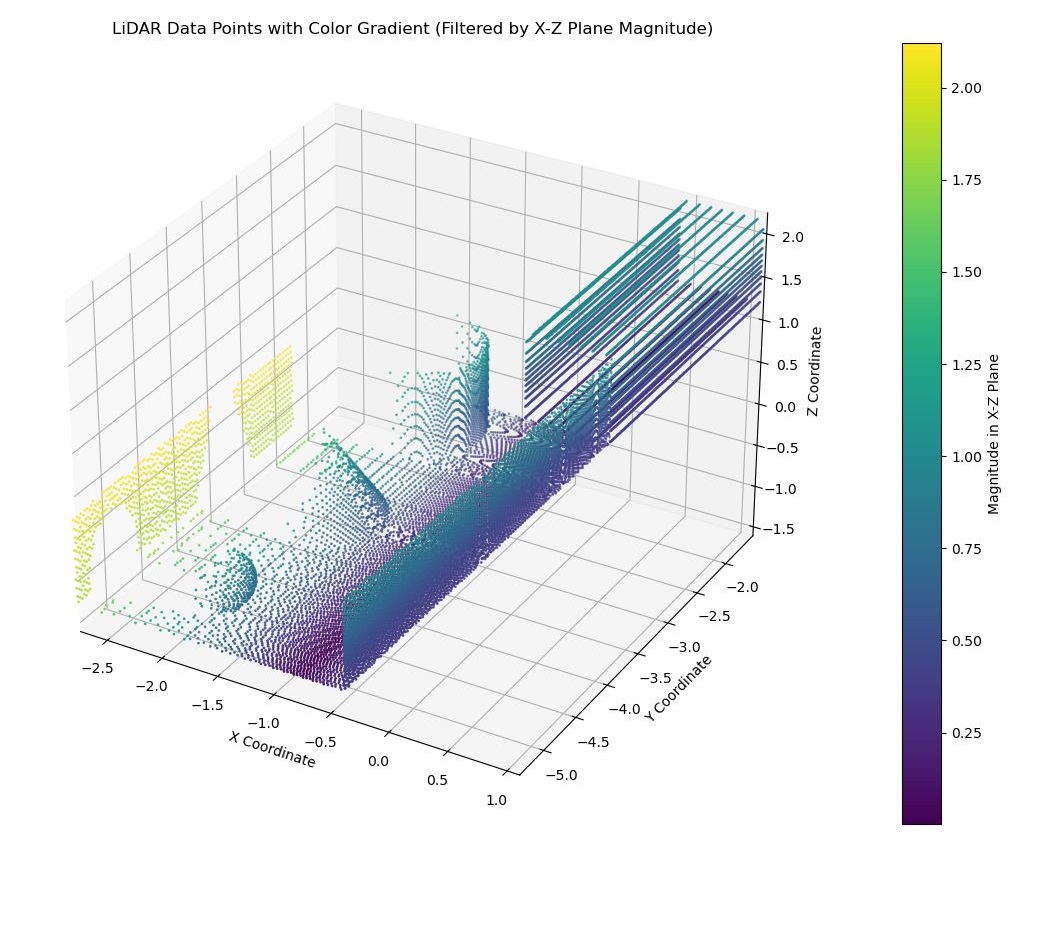
There are two things happening, the lidar emits a laser and, through how long it takes to return, is able to measure the distance from this to an object. Now, if we repeat this process while the laser spins around, we can obtain the perimeter of what surrounds the lidar in a plane. If we also calculate the robot's position quickly enough, we can acquire successive perimeter plans to form a 3D representation of the space around the robot.
Finally we have the point cloud formed by the lidar. This is basically what Maquintel does to generate 3D profiles of pipes and channels, where with little additional effort you can measure the wear level by comparing which points exceed a certain threshold.